How to process robot video#
Before we start#
The robot utilizes USB camera to explore the environment.
To get started with video processing you will need the following:
single board computer Odroid with WiFi and SSH set and running
USB WiFi dongle
Odroid power cable
USB web camera
SSH terminal client software installed on PC or laptop. We’ll be using MobaXTerm for
demonstration purposes, but any other SSH terminal client can be used.
Insert WiFi dongle and web camera into Odroid’s USB ports and you’re ready to go.
Step 1. Power up Odroid#
Ensure that WiFi dongle and web camera are inserted into the Odroid’s USB ports and WiFi connection is set for the microcomputer. Power up Odroid and connect to it with MobaXTerm.
Step 2. Copy Valera code to Odroid#
Valera code is a free and open source software repository with example code to control the robot.
Create a separete folder to store the code: mkdir Code && cd Code
Copy the repository code to the new folder: git clone https://github.com/goodlancer-org/valera-code
Change the current working directory to the folder with code: cd valera-code
Step 3. Run Valera code#
Valera code includes files to run docker, to start a JupyterLab server on Odroid and workbooks with example code for the robot.
To start Valera code type sudo docker compose up
When the server is running go to your laptop, open a browser and navigate to
http://[odroid_ip_address], in my case it will be http://192.168.1.226
The password for Jupyter is Valera
Step 4. Explore and run example code#
When in Jupyter open up ‘work’ folder to see the example workbook.
Double click video.ipynb file to open example code.
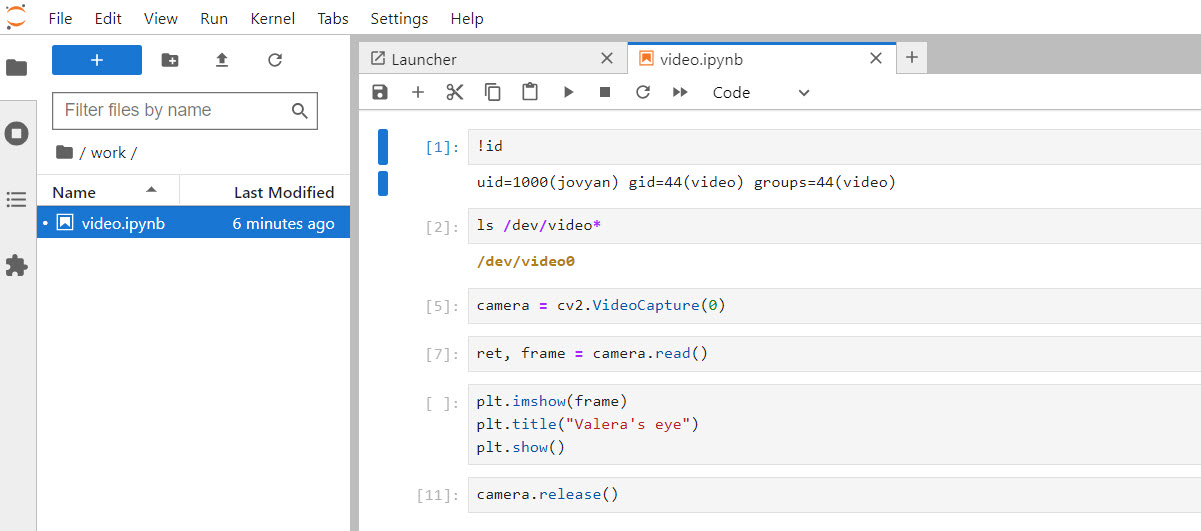
Run example code to see how the camera works:
The simpliest code to read images from the camera is as follows:
# Activate camera object
cap = cv2.VideoCapture(0)
# Take a picture
_, frame = cap.read()
# Convert the picture to bytes
_, frame = cv2.imencode('.png', frame)
frame = frame.tobytes()
# Release the camera object
cap.release()
Finish#
All the example code for Valera (dockerfiles, docker compose, shell scripts, python code) is provided free and open source. Please feel free to change it to adopt to your needs.